
PhotoModeler Motion Examples
The PhotoModeler Motion Tool can capture accurate 3D data changing over time. The following are some examples of test projects that show the various capabilities. While most of these examples are slow speed (seconds per frame, or single digits frames per second), you can extrapolate these results to high speed results (10’s or 100’s of frames per second). The requirements for high frame rate capture in Motion are: a) a frame rate high enough so that targets don’t move farther than the average inter-target distance between frames, b) lighting, camera quality, and frame rate suited to capturing the targets unblurred, and c) good synchronization between cameras.
- Dense Surface Change Example
- Targeted Shape Type 2 Example
- Fan Blades Type 1 Example
- Rubber Sheet Type 1 Example
Dense Surface Change Example – Type 1, multiple cameras
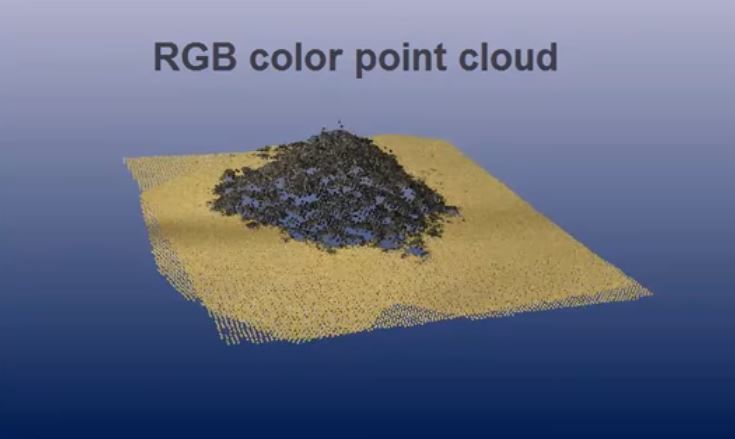
This Youtube video shows a triangulated dense surface mesh of a growing sand pile was modeled over time.
Targeted Shape Change Example – Type 2, single camera
The animation below shows the results of a Motion Type 2 project using a sequence of images from one camera of a sheet of paper with a cylinder moving under it. The targets were all tracked automatically over the picture frames after the first epoch was set up like a standard Coded Target PhotoModeler project. The sheet of paper is static/un-moving at each epoch while the photos were taken by the single camera moved to multiple positions.
Fan Blades Example- Type 1, multiple cameras
The animation below shows the results of a Motion Type 1 project using a sequence of images from three stationary synchronized cameras of a simple object that is continuously moving. The targets were all tracked automatically over the video frames after the first epoch was set up like a standard PhotoModeler project.
The top part of image shows the 3 tripod mounted cameras and the images below show three photos from one epoch (one time frame). Below that are two animations showing the 3D results over time.

One photo from project
Animations of 3D result
Deforming Rubber Sheet Example – Type 1, multiple cameras
The animation below shows the results of a Motion Type 1 project using a sequence of images from three stationary cameras of deforming rubber sheet. The rubber sheet was stretched and then was unmoving during the approx. one second for the three cameras to fire. The targets were all tracked automatically over the video frames after the first epoch was set up like a standard PhotoModeler project.
The left of image below shows the camera setup (4 cameras on tripods) and the rubber sheet with dot targets, surrounded by coded targets (here the coded targets make the project setup automated). The right of image shows the PhotoModeler screen with one of the photos with marks, and two 3D Views of the computed 3D points and one epoch.
Photo sequence on the left and 3D model animation on the right