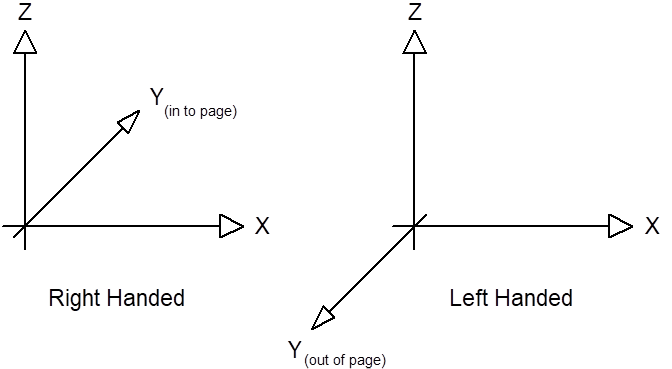
A Cartesian coordinate system in which the location of the third axis may be inferred from the location of the two other axes, by using the right hand rule. This rule states that, if you form the first three fingers of your right hand into three perpendicular vectors, and point your thumb in the direction of the X axis, and your index finger in the direction of the Y axis, your middle finger will point in the direction of the Z axis.